空空导弹控制仿真系统
运行环境:WindowsXP或Vista操作系统;安装了simulation 模块的LabVIEW 8.2或以上版本。
背景
LabVIEW控制、设计与仿真模块为用户提供了一系列快捷、有效的工具,使用户可以方便地在统一的平台上进行系统的设计、原型和最终的部署,从而提高了代码的重用率。本演示将以一个空空导弹的控制仿真系统为例,向各位展示如何用LabVIEW来搭建仿真模型。

本仿真系统提供了一个对导弹进行精确制导打击飞行目标(F14)的仿真平台。系统首先仿真雷达获取飞行目标的飞行信息,包括飞行速度与飞行姿态;接着导弹基于飞行接近的追踪算法产生当前时刻导弹的速度与姿态,最后根据导弹当前时刻与前一时刻的飞行信息来设定导弹的火箭发动机状态。
整个系统的构成包括有:F14战斗机3D模型,空空导弹3D模型;仿真雷达站。
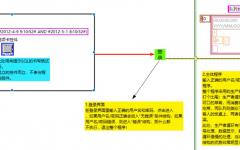
系统工作过程为:首先设定F14的飞行轨迹,同时导引导弹设定F14为打击目标;仿真雷达监测F14的飞行信息,导弹的指导控制中心使用平行接近算法对导弹进行实时的制导控制,对导弹飞行轨迹的实时控制通过火箭发动机实现;最后击毁目标。系统效果平面图如下:
对于导弹的跟踪控制算法,我们选用平行接近法,它是指在整个导引过程中,目标线在空间保持平行移动的一种导引方法。也就是说,不管目标作何种机动飞行,导弹速度向量V和目标速度向量VT在垂直于目标线方向上的分量相当。因此,导弹相对于目标的速度正好在目标线上,它的方向是之中指向目标。其示意图如下所示:
程序运行说明
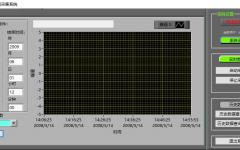
打开程序后,会看到系统的用户界面,用户界面由四部分组成:F14与空空导弹的参数设置,位于界面的左边;空空导弹追击F14的曲线展示,位于界面的中间;F14的飞行角度展示,位于界面的右边;最后一部分包括停止按钮、指示灯(当空空导弹击中F14时)等,位于界面的右下角。
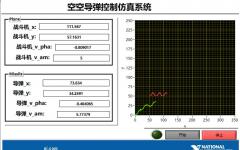
运行程序前,首先设置F14与空空导弹的参数,包括飞机的二维坐标、飞行速度与角度,空空导弹的二维坐标、飞行速度与角度,系统默认的参数如下图所示。
设置好参数后,直接点击运行即可。F14会按照事先设定好的曲线在界面上飞行以躲避空空导弹的追踪,F14的默认曲线为正弦波;空空导弹根据平行接近法不断的改变自己的飞行速度与角度,最后追踪上F14,并把其击毁。
运行过程中,左边的参数设置部分会实时的显示当前时刻F14与空空导弹的位置信息与速度信息;他们的飞行轨迹则会在中间部分得到体现,红色线条代表了F14的飞行轨迹,绿色线条代表了空空导弹的飞行轨迹;界面的右边显示了F14飞行过程中的3D效果;当空空导弹把飞机击毁后,下面的指示灯会被点亮,程序终止。
四.实现
仿真循环
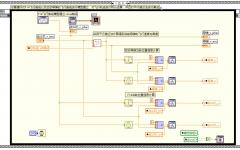
本例中我们使用LabVIEW仿真模块对F14飞行曲线以及空空导弹的飞行曲线进行模型建立,并对飞行轨迹进行积分运算,而且集成了平行接近法,如下图所示。通过NI LabVIEW仿真模块,可以将动态系统仿真与LabVIEW环境进行集成,并可在新的仿真结点内的程序框图中建立线性、非线性、离散和连续的插置或控制系统。从积分器、微分器和传递函数等框图中创建模型,然后加入图形和控件对这些模型进行测试。
另外,还可导入在NI LabVIEW控制设计工具包或NI LabVIEW系统识别工具包中开发的模型。交互式的LabVIEW工具可在记录仿真结果的同时对参数进行修改。通过仿真结点创建的模型可无缝下载至具有用于成型和硬件在环仿真控制的LabVIEW实时模块的实时目标硬件上。
程序中,首先利用仿真工具包中的sine signal对F14的飞行曲线进行设置,然后实时的计算出导弹与F14的当前位置信息。程序如下图所示:
2. 平行接近法
我们使用LabVIEW来实现导弹的平行接近算法,平行接近法是指在整个导引过程中,目标线在空间中保持平行移动,其导引关系式为:
式中,q为目标线与坐标轴的夹角,或
于是有:
式中,表示导弹速度向量与目标线的夹角,表示F14速度向量与目标线的夹角,表示目标线的长度。
于是有:
上面的公式表示,不管目标作何种机动飞行,导弹速度向量V和目标速度向量VT在垂直于目标线方向上的分量相等。因此,导弹的相对速度正好在目标线上,它的方向始终指向目标。导弹与目标相对运动方程组为:
程序最后的实现结果如下图所示:
五.总结
本例借助于LabVIEW的卓越功能,对空空导弹控制仿真系统进行了搭建,并且使用了LabVIEW来实现导弹平行接近法的控制算法,此外,还使用了仿真模块循环对****进行了仿真建模;最后还用了3维的图形控件来即时地显示飞机的当前姿态,从而达到很好的显示效果。
![]() 导弹仿真系统 the-labview-missile-demo.zip
导弹仿真系统 the-labview-missile-demo.zip